Extract 3D points from raw, full waveform LiDAR files. Get more points and more accurate results even at high altitude and in difficult cases with low vegetation. High throughput achieved using efficient algorithms and an optimized parallel implementation.
Input:
– Raw waveforms: Riegl SDF
– Point clouds: Riegl RXP
– [position & orientation file, geodetic]
– [calibration and mount files]
Output:
– LAS/LAZ 1.2-1.4 or ASCII file [extra attributes + uncertainty]
– [PulseWaves waveforms]
– [exported trajectory, footprints, transects, stat files]
Direct decoding of Riegl SDF files (scanner types 560 to 1560)
Single pass decoding, processing, georeferencing, LAS/LAZ output
Single pass georeferencing for RXP point clouds
Automatic MTA range ambiguity resolution up to 2 MHz, 32 zones
Cloud/fog noise filtering
Optimal pre-calibrated sensor parameters
Channel fusion and pulse ordering
Extraction robust to peak overlaps and noise
Underground false alarm suppression
Channel cross-talk suppression
Fast, accurate waveform decomposition
Ultra-fast extraction options for quick preview
Physically meaningful target attribute extraction
Uncertainty attribute export options
Scanline-based outlier filtering (high/low point elimination)
Various correction options (intensity, IBRC, width…)
Footprint, transect, center and trajectory export
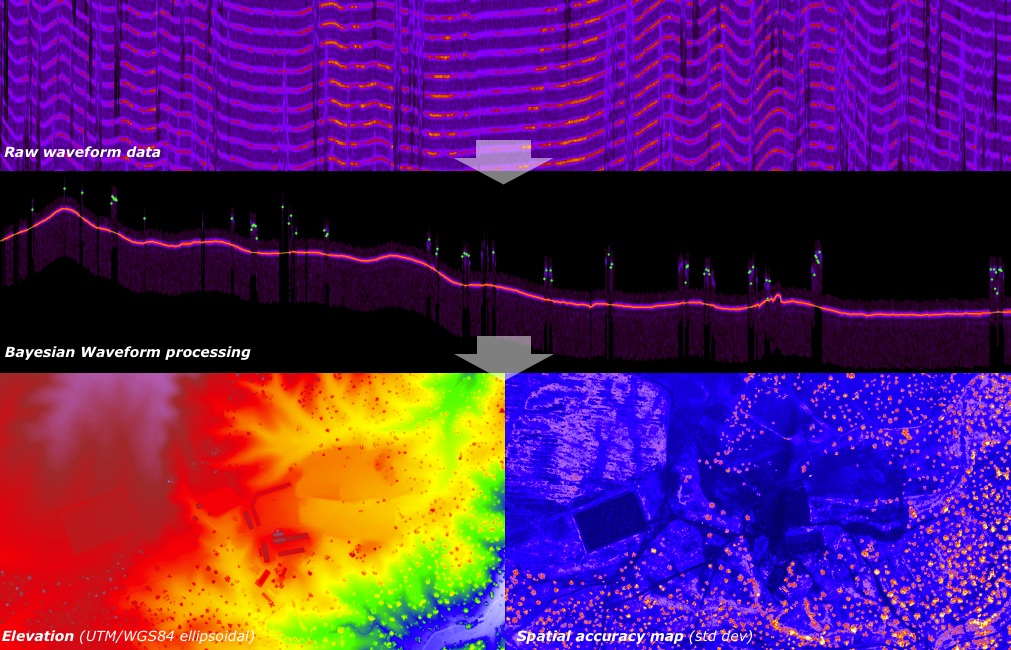
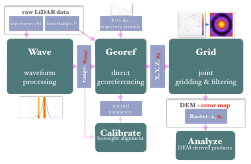
Full-waveform data processing framework: Raw binary files are processed to extract a maximum number of peaks in a robust way, despite contamination by noise, sensor artifacts and low vegetation. Outlier wave filtering helps to reject low and high points. Range and intensity uncertainties are computed using extracted peak parameters. Gridded products can then be generated with the upcoming AccuGrid module taking full advantage of the computed pointwise uncertainty, for an optimal combination of points and swaths.Automatic MTA processing allows to properly assign the right emitted pulse to each received waves even when there are multiple pulses in the air in complex situations
Physical parameters such as range and target thickness are estimated using a waveform decomposition that takes into account the system impulse response. This way a low false alarm rate and optimal location accuracy can be achieved.
Your benefits
Accuracy improvement
Bayesian inference is not only about producing fuzzy quantities! It actually ensures that results have maximum accuracy, compared to ad-hoc or classical approaches. Proper modeling ensures reduced errors and is effective in waveform processing. High detection rates can be achieved, allowing you to fly higher and cut collection costs!
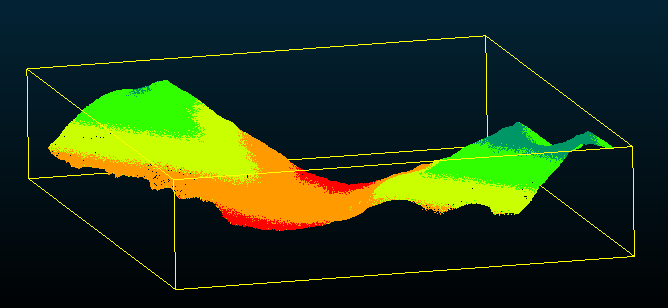
Optimal data fusion, or swath combination, helps produce highest possible accuracy elevation models given the collected data.
Automation
Manually tuning essential processing parameters is no longer necessary. Topography smoothness, outlier frequency, that’s the algorithm’s problem, not yours!
Deciding at what scan angle to cut off data is over! Uncertainty propagation ensures a proper weighting is applied to each data point, avoiding throwing away precious information and significant portions of the input point clouds.
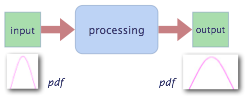
Uncertainty management
Managing uncertainty properly allows not only to propagate errors, but to preserve information by using error structure (e.g. covariances). Understanding how uncertainty affects elevation is essential for further shape analysis and change detection. This does not come with the data, but we help you compute it!
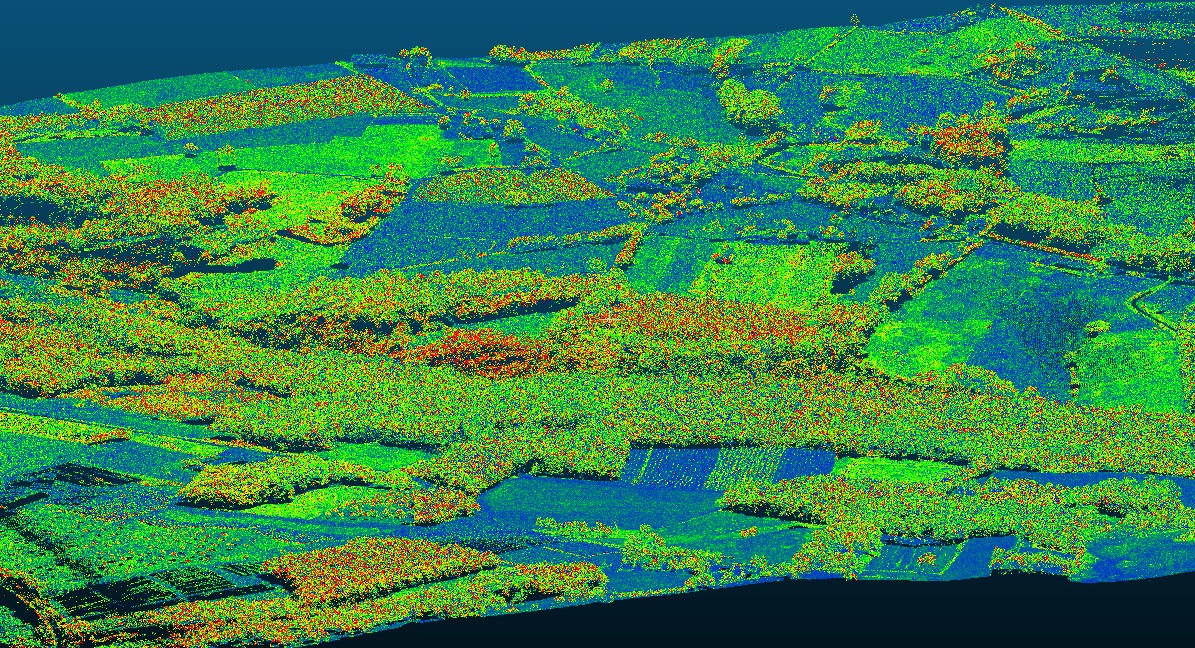
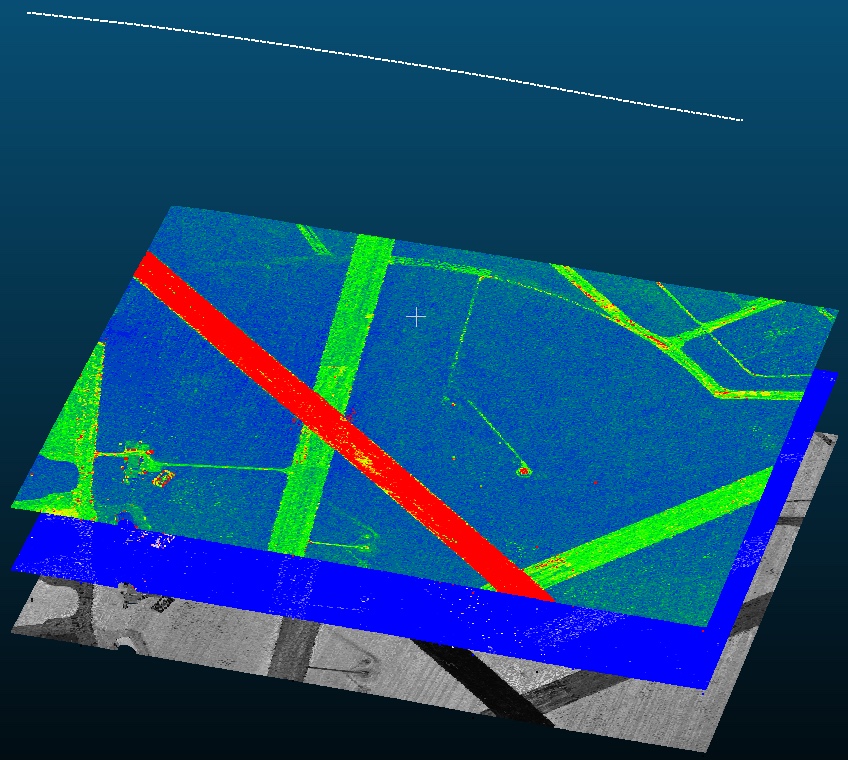
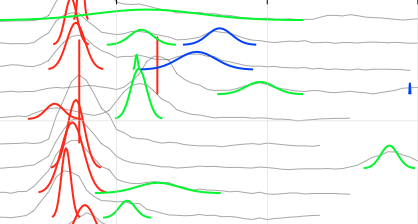
Pulse widening attribute, useful for classification, exported with Wavex 1.1b while extracting directly from a Riegl SDF raw waveform file. Decoding, MTA resolution, outlier rejection, waveform decomposition, filtering, pulse reordering, georeferencing and LAZ export are performed in a single pass.Example of attributes exported by WavEx 1.0: range uncertainty (top), target thickness (middle) and corrected intensity (bottom). The reconstructed trajectory points are shown in white above the three layers. NERC-ARSF data.
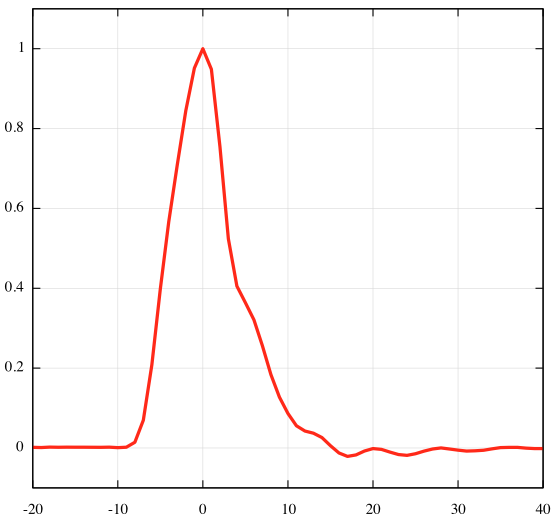
Impulse response of the Leica ALS-50 LiDAR waveform digitizer related to the NERC-ARSF data in the example above. The software estimates it from random samples taken from the waveform file, in a robust way, no user interaction required.